New Interface.
Why:
We all know that working with the voltage on the circuit is a dangerous affair ...
and yet ...
To try fast clear a malfunction, somewhere a 16V~ power line must have hit a low voltage point of S88, with disastrous consequences.
The interface, keyboards and control 80 and ready for the trash.
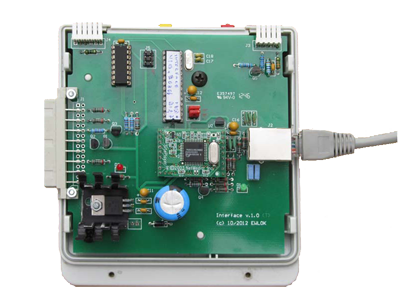
Because we were already planning to make something our self, and to move from RS232 to Ethernet, we have put developing our own interface in a higher gear.
The results is nice, fully compatible with Marklin commands, the interface does the S88 bus, and also generate booster signals.
Adaptations:
To easily adapt firmware, the interface is equipped with a boot loader and firmware can be replaced "On the fly".
The program ewLok gives, when entering certain blocks, the command to the locomotives to start a signal. (Horn or so)
It was noticed that the signal at the Marklin interface, used with a control 80, came through at different times, we see that "function command" is passed only as any other "urgent" commands were finished.
This we changed in the new interface and all the commands (Functions and Speed) are equal in priority, making a locomotive gives his signal, each at the same time when entering a block.
The program ewLok is regularly (every 333 ms) polling the S88 bus, should this be interrupted by pressing "stop" or PC crash or loss of Ethernet for more than 10 seconds, the interface shuts down the data and initialize a "STOP" .
If you do not want the interface stops the data, then there is a "God Mode", this one can start with sending a "g" to the interface. This is primarily provided for testing purposes.
Besides the known commands "Start" and "Stop" an extra is added, "Reset" causes the interface to do a warm start.
Future:
Extend the interface to MFX, however provisionally without feedback (automatic recognition).
Replaced old marklin commands by CAN.